|
Hello everyone! Our team had COVID-related issues for the last two weeks and we finally had the chance to meet all together in person on Tuesday. Some other updates for the week:
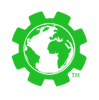
 Dave Beach's drawings/notes We also discussed our issue getting hammer blades and managing their weight with a scaled down prototype. He suggested we can try custom making L-shaped sheet metal since it's a rough approximation and use it for preliminary testing. We have already made our custom 'blades' and we are going to weld it onto the rod on Thursday so we can do preliminary tests until the hammer blades arrive. We measured the angle of the hammer blades at the bend and bent the metal to be this exact angle (85 degrees). We also used the relative size of the blades to the axle and maintained that ratio constant in order to make it a closer approximation.  Alawab will also run some other calculations on how close the approximation is using parameters like its mass, momentum during a rotation and we will film it and compare it visually to how hammer blades rotate.
Isabella has been running some tests on our previous prototypes. She is currently measuring the horizontal and vertical area it covers, to ensure a blade can cover the sufficient height and width of a cotton stalk. She is also measuring the rpm of the axle itself based on variable drill speeds, so if the drill we are using turns out to be too fast/too slow we can quantitatively approximate what speed is ideal. We also found some industrial specifications for flail mowers (very similar to what we've been building) here: http://ncsheriffs.org/Heavy%20Equipment%20Bid%2019-03-0504/Equipment%20to%20Add/Quality%20Equipment/Lot%2032/Copy%20of%20RF90ED%20%28Rear%20Flail%29030714.pdf. We will be comparing out prototype and which of these specifications it meets and doesn't meet. Next week, we'll likely present some experimental data we've gathered over the past weeks and start prepping for the presentation. See you next week! ~Boomitra Team
0 Comments
Moving forward with the the final design, this week our team was primarily focused on building skills and concluding the materials that would work best for the purposes of the final prototype. Due to the fact that the final design will incorporate real hammer blades that are much heavier than the 3D-printed hammer blades that were used in the mid-quarter prototype, our team has prioritized finding an axle (functioning as cutter shaft) that will able to withstand the weight and force of the final design blades. In discussing the options for getting the necessary axle, we found that the most economical and sensible decision would be to weld a portion of the axle ourselves. Most of the team was not experienced for the type of welding necessary to make the axle, therefore two of our team members are learning to weld through the PRL (product realization lab). Besides learning to weld, our team has prioritized laying out the goals and tests the will allow us to measure up to the user and technical requirements for the project. Our main goals to demonstrate in the midst of producing the final design will be: 1. Determining Blade Movement 2. Determining the Cutting Potential of the Shredder with Accessible Materials 3. Determining the Cutting Potential of the Shredder with Higher Power and Real Hammer Blades. The test that we will run that will assist in reaching these goals involve using a stop motion camera to better visualize the blade movement and attempting to cut different materials with the shredder at different power levels. In the near future, our team also plans on visiting Alan steel to take a closer look at pieces that will be used in the final design. Our team is also looking forward to talking over our project with a faculty member with more experience in the manufacturing industry (specifically for mechanized tools) and mechanical engineering.  We are excited to have started prototyping our final (for this quarter) design! Our team has been learning how to weld and are going to spend the next week figuring out how to do the following through welding:
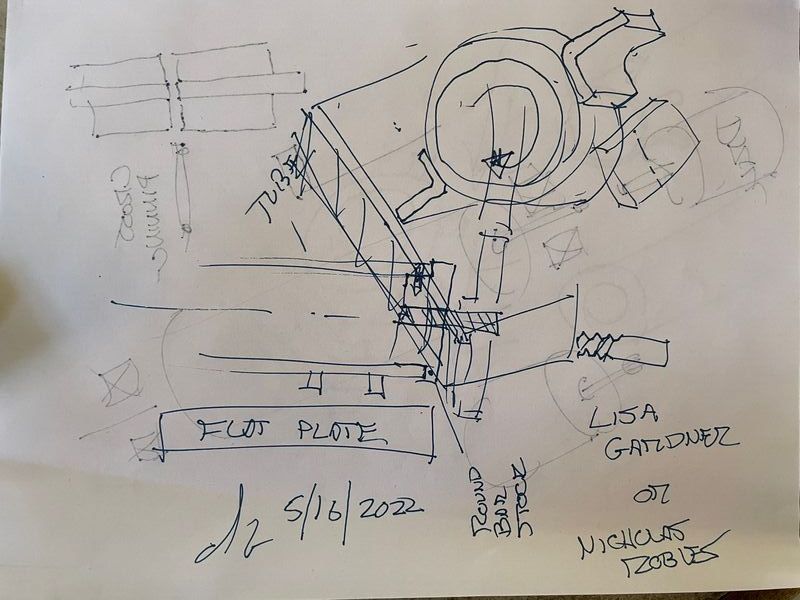
Jierui unfortunately has COVID, so she'll be taking a lighter load this week. Jierui will be working on researching available materials and their costs from the list above so that they will be readily available when we put the shredder together. Isabella will be working on a testing plan for the shredders specifications for the remainder of the quarter. We have some rough experiment ideas to measure different aspects. We have thought of experiments to measure momentum required to knock over the stalk so that we can identify the right motor with the right rpm that will generate this momentum. We will also be testing whether the blades hit at the right angle and the depth at which the blades hit the stalk to understand the effectiveness of the shredder design. Here is the link the to testing plan: click here. This doc will be constantly evolving as we update some of our ideas. We would love to hear your thoughts on these tests and if you can think of better experiments to measure these parameters (feel free to leave comments on the doc!). We would also love any welding experts to help us out with learning and determining which type of welding is suitable for different aspects of the design. ~Boomitra team Putting it togetherAfter problems sourcing materials last week, we finally found the gears, motor and belt we need. Our team took a trip to Grainger in San Jose to buy the gears in person. After spending time comparing many different gears and constantly converting from millimeters to inches (and vice versa), we finally bought the following materials. Before diving into the teams progress for this week, we wanted to discuss our prototype plan. Our prototype is focused on achieving the following user requirements:
Inspired by electrical tillers and other farm mechanisms, we settled on a simple motor belt system that turns an axel with blades attached on it. See similar designs here : https://www.johnnyseeds.com/tools-supplies/bed-preparation-tools/tilther/tilther-9286.html. Our design utilises a simple motor or a drill, which is easily available from most hardware shops. Our goal is to build a simply motor driven circuit that drives a small gear which then drives a larger gear through the belt. The larger gear drives the axel which has blades attached on it. The small gear drives the big gear results in a lower rotational speed of the axel but a larger torque. The larger torque is required to cut/break the sturdy cotton stalk. To build our first iteration of the prototype we acquired the following materials.  After testing the motor, we realised the rotational speed of the axel is too slow. We iterated the prototype with an electrical screwdriver which delivered much better rpm. We had success with the rotation of the gear system! Here is what the rough prototype looks like:  Our next steps for this week are:
Looking forward to sharing our finished rapid prototype in the next blog! - Boomitra team During Week 3 the ESWxBoomitra team prioritized finalizing the prototype's sketches and design. After meeting at the Stanford Farm in Week 1 and looking further into potential designs throughout Week 2, our team has finally started moving forward with building a prototype of a portable shredder that can easily be handled by one adult and that will incorporate a simple, yet powerful motor. For the purposes of creating a functional prototype for the Week 5 presentation, we have decided that the initial prototype will mostly be built out of scrap cardboard and wood. As such, the motor that will be incorporated into the prototype will be significantly less powerful than the motor used in a finalized future design where the shredder will be made out of metal. Otherwise, the overall design of the prototype for this quarter should closely resemble the more robust designs that will be carried out for the shredder in the future.
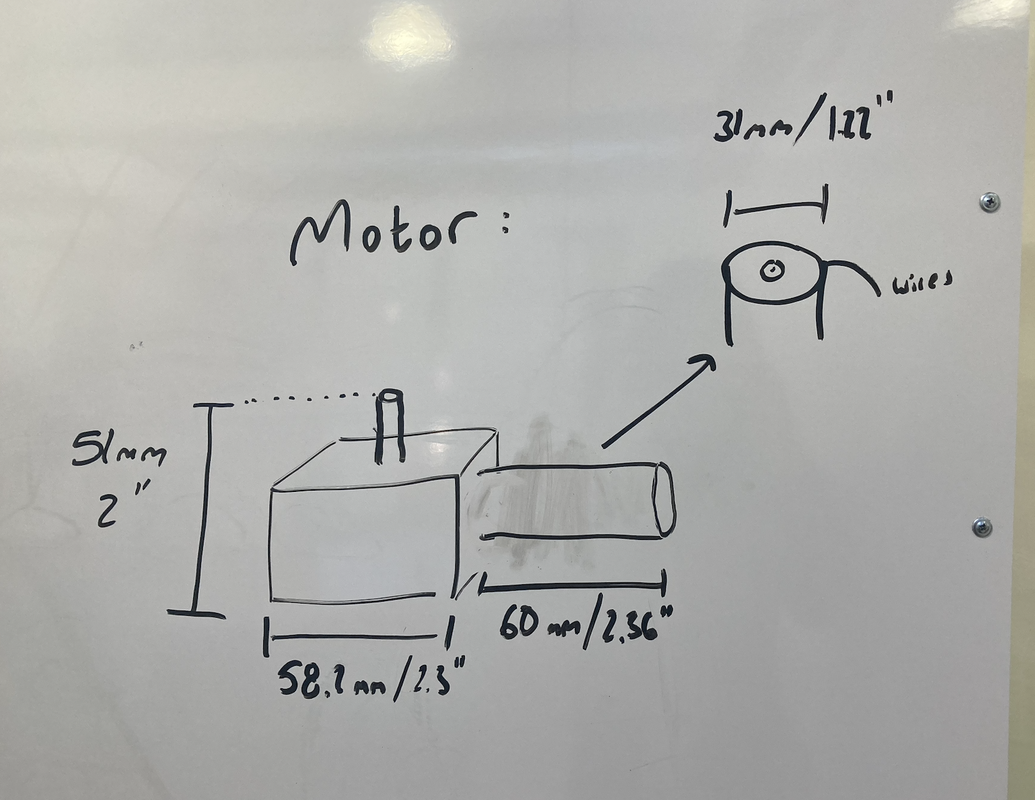
The design of the shredder currently has three main elements: the handle frame, the box holding the motor system and covering the blades, and an axel with specialized blades within the box. Although we have determined that the handle frame and the box itself can be made out of the scrap cardboard we've acquired, it was necessary for the items for the motor system that will spin the blades to be purchased on Amazon. These items include: a 12V DC motor, 1.5V batteries, an aluminum belt pulley, and ball bearings. Since items for the motor system have yet to arrive from Amazon, we might have to adjust the dimensions of the box to properly fit all the parts.
In the upcoming weeks we expect to spend most of our time as a team in the product realization lab (PRL) putting together the prototype. With the Stanford Farm we have also clarified the organic cotton seeds that can be used in their growing beds; planting of the seeds to begin measuring germination rates is likely to commence at the beginning of Week 4.  Cotton seeds approved by the Stanford Farm. The ESWxBoomitra team has spent time working with the Stanford Farm and in the Product Realization Lab (PRL) the first two weeks of spring quarter. The team is working on two goals concurrently: 1. Acquire cotton seeds and test the effect of stubble incorporation on the germination of cotton. To that end, the team has secured a planting bed at the O'Donohue Family Farm for testing.  Courtesy of: www.Amazon.com 2. Complete a preliminary design sketch of the shredder using existing designs and models for shredders. On Tuesday 4/5/2022, the team met at the PRL to research existing designs and discuss the design process. The goal is to develop a prototype that, for the time being, is functional and able to "cut/ shred" simpler materials such as paper, grass, etc... Below are some of the designs being considered and will be further explored moving forward. The team spent time studying various blueprints to further understand the mechanisms driving blade design. The goal is to acquire ready made blades from manufacturers designed for tilling, for use in the prototyping phase:  Courtesy of: https://www.vintageprojects.com/sites/default/files/articles/RotoTiller.pdf The team plans to have a prioritized design sketch by the end of week 2, so that prototyping can begin promptly starting week 3. We are also excited to discuss our design with our community partner, Anirudh, who is a mechanical engineer himself and receive his feedback before prototyping. Planting will likely occur in week 3, after which the team will focus on developing and iterating the prototype in preparation for the week 5 showcase. |
AuthorWrite something about yourself. No need to be fancy, just an overview. ArchivesCategories |



 RSS Feed
RSS Feed
